Temps réel/Approches avec exécutif
Sommaire |
Systèmes
Noyau
Fournis le strict minimum
Exemple : Noyau TR RTC
- 27 primitives
- 3 à 4 Ko
Exécutif
C'est un noyau étendu
Système d'exploitation
Un éxécutif, plus un environnement de développement convivial.
Traitement monotâche
Le programme se résume à une boucle de scrutation.
Traitement multitâches
En deux phases :
- Prise en compte des évènements
- Activation de la partie logicielle associée a l'événement
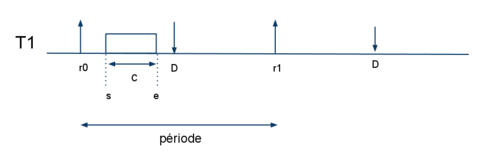
Légende
- C : durée maximale d'exécution de la tâche lorsqu'elle a le processeur pour elle tout seule
- D : délai critique, échéance, date maximale à laquelle l'exécution la tâche doit être terminée
- P : période, durée qui s'écoule entre deux requêtes successives
- s : task start
- e : end en task
- TR : temps de réponse de la tâche
TR = e - r
AUTRE SCHEMA ICI
- Laxité nominale : 5 - 2 = 3
ie : on peut retarder au maximum l'exécution de T1 jusqu'à la date 3, après il y a une faute temporelle - Laxité nominale résiduelle : calculée à t = 2, indique que l'on peut attendre jusqu'à la date 4 pour reprendre l'exécution de T1
- Estimation de la durée maximale d'exécution d'une tâche lorsqu'elle dispose du processeur pour elle seule, WCET (worst case execution time) = C
Etude d'un cas
Estimation de la durée maximale d’exécution d'une tâche lorsqu'elle dispose du processeur pour elle toute seule.
WCET (worst case execution time) = C
procedure P(a,b,entier)
début
pour i allant de 1 jusqu'à a faire
si (b >= 4) alors traitement X (très long)
sinon traitement Y (moins long)
fin si
fin pour
fin procédure P
Méthode d'analyse dynamique
On exécute le programme pour plusieurs jeux d'entrée a et b (paramètres d'entrée) sur une machine donnée.
Le WCET s'obtient en faisant la différence entre la date machine à la fin d'exécution et la date machine relevée en début d'exécution.
Difficulté : connaître précisément les plages de variation des paramètres d'entrée.
Méthode d'analyse statique
On transforme le programme en un problème mathématique d'optimisation linéaire
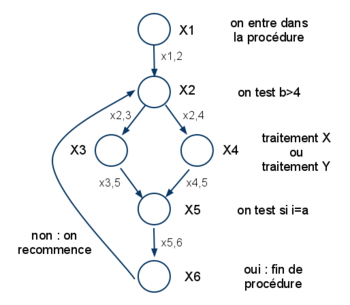
On associe au programme un graphe :
- Noeud : une suite d'instruction non conditionelles auquel on peut associer un temps d'exécution (lié à la machine)
- x : le nombre d'exécution du noeud i
- xi,j : le nombre de franchissement de l'arc entre xi et xj
Trouver le WCET reviens à : Maximiser
z = x1 t1 + x2 t2 + x3 t3 + x4 t4 + x5 t + x6 t6
Avec les contraintes
- x1 = 1 = x6
car on entre ou on sort une fois de la proc. - x5,2 <= 10
car on reboucle 10 fois au max - x2 = x1,2 + x5,2 = x2,3 + x2,4
car on entre dans un noeud autant de fois qu'on en sort - x4 = x2,4 = x3,5
- x5 = x2,5 + x4,5 = x5,6 + x5,2
Approches et techniques classiques
Voir le cours Système d'exploitation (ordonnancement des processus)
- Fonctionnement en temps partagé
- Temps partagé en round-robin simple (une file)
- Techniques des files d'attente multiples
Favorise les processus courts, ralenti les processus longs.
Tâches périodiques indépendantes
1er cas : uniquement des tâches périodiques
- qui ne partagent pas de ressources
- non liées par des contraintes de précédence
Algorithme à priorité constante
- P = Période
- C = Durée d'exécution
- r = date de réveil
Exemple : Rate Monotonic
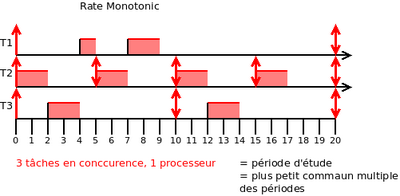
- Tp1 = (r0 = 0 , C = 3 , P = 20)
- Tp2 = (r0 = 0 , C = 2 , P = 5)
- Tp3 = (r0 = 0 , C = 3 , P = 10)
Condition suffisante :
Somme[i = 1 jusque n] Ci / Pi <= n ( 2^1/n - 1 )
Somme[i = 1 jusque 3] Ci / Pi = 3/20 + 2/5 + 2/10 = 0,75
3(2 ^{1/3} - 1) = 0,78
Donc les tâches sont ordonnancables
Exemple : Inverse deadline
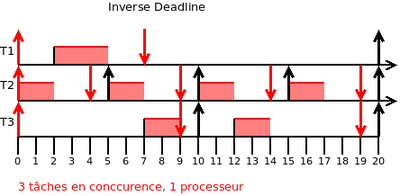
- Tp1 = (r0 = 0 , C = 3 , D = 7 , P = 20)
- Tp2 = (r0 = 0 , C = 2 , D = 4 , P = 5)
- Tp3 = (r0 = 0 , C = 3 , D = 9 , P = 10)
= Somme[i = 1 jusque 3] Ci / Pi = 0,79
3(2 ^{1/3} - 1) = 0,78
P(Tp2) > P() ..........
Algorithme à priorité variable
Exemple : Earliest Deadline
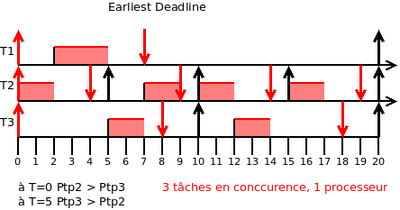
- Tp1 = (r0 = 0 , c = 3 , D = 7 , P = 20)
- Tp2 = (r0 = 0 , c = 2 , D = 4 , P = 5)
- Tp3 = (r0 = 0 , c = 3 , D = 8 , P = 10)
à t = 0, P(Tp2) > P(Tp3)
à t = 5, P(Tp3) > P(Tp2)
Exemple 2 : Earliest Deadline et Least Laxity
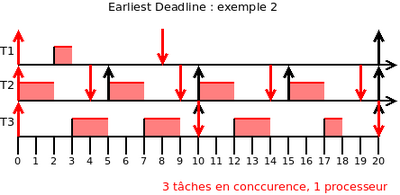
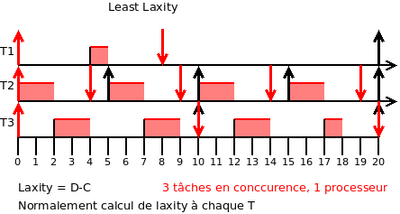
- Tp1 = (r0 = 0 , c = 1 , D = 8 , P = 20)
- Tp2 = (r0 = 0 , c = 2 , D = 4 , P = 5)
- Tp3 = (r0 = 0 , c = 4 , D = 10 , P = 10)
à t = 0
- L1 = 8 - 1 = 7
- L2 = 4 - 2 = 2
- L3 = 10 - 4 = 6
à t = 3
- L1 = 8 - 1 = 7
- L3 = 10 - 3 = 7
à t = 4
- L1 = 8 - 1 = 7
- L3 = 10 - 2 = 8
Tâches apériodiques à contraintes relatives
2ème cas : tâches périodiques + périodiques à contraintes relatives
- sans partage de ressources
- sans contrainte de précédence
Traitement d'arrière plan
Exemple
Tâches périodiques, ordonnées suivant l'algorithme "Rate Monotonic" :
- Tp1 (r0 = 0 , C = 2 , P = 5)
- Tp2 (r0 = 0 , C = 2 , P = 10)
Tâches apériodiques
- Ta3 (r0 = 4 , C = 2)
- Ta4 (r0 = 10 , C = 1)
- Ta5 (r0 = 11 , C = 2)
Serveur de tâches
Tâches périodiques, ordonnées suivant l'algorithme "Rate Monotonic" :
- Tp1 (r0 = 0 , C = 3 , P = 20)
- Tp2 (r0 = 0 , C = 2 , P = 10)
- Tp3 (r0 = 0 , C = 2 , P = 5)
Tâches périodiques
- Ta3 (r0 = 4 , C = 2)
- Ta4 (r0 = 10 , C = 1)
- Ta5 (r0 = 11 , C = 2) <-- serveur de tâches apériodiques
à t = 0, aucune tâches apériodique à servir, le programme est attribué à Tp2 (non pas à Tp3)
Tâches apériodiques à contraintes strictes
Exemple
Ordonnancement selon l'algorithme Earliest Deadline
Tâches périodiques
- Tp1 (r0 = 0 , C = 3 , D = 7 , P = 20)
- Tp2 (r0 = 0 , C = 2 , D = 4 , P = 10)
- Tp3 (r0 = 0 , C = 2 , D = 8 , P = 5)
Tâches apériodiques critiques
- Ta3 (r0 = 4 , C = 2 , D = 10)
- Ta4 (r0 = 10 , C = 1 , D = 18)
- Ta5 (r0 = 11 , C = 2 , D = 16)
Traitement des Situations de surcharge
Si on peut pas respecter tout ls échéances temporelles On favorise le traitement des tâches les plus importantes Ti(ri,ci,Di,Pi,imp) imp : Importance de la tâche. Algorithme : A une date donnée, On classe la liste des tâches actives selon leur ordre croissante d'échéance T={Ti} Pour chaque tâche \(Ti \in T\) on calcule \(LCi = Di - (\sum_{j} Cj, dj \leslant di ) \) si \(\exists LCi < 0\) alors il y a surchage.
LC = Echéchance - t - tache restante - tache precedente.